+86 18652221058
- English
- Chinese
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu
- Kinyarwanda
- Tatar
- Oriya
- Turkmen
- Uyghur
Produkto kategorija
-

SANY krano aukščio ribotuvas (nuo pervyniojimo jungiklis)
-

Hirschmann A2B-Z DC-12 aukščio ribinis jungiklis (anti-overwind jungiklis)
-

Bosch 0281020410 variklio ECU valdymo modulis
-
X603F apkrovos momento indikatoriaus (LMI) ekrano terminalas
-

XCMG XESA2B-CL15M
-

ZOOMLION originali DX-25B kabelio ritė
-

P&G JC2000 pramoninis vairasvirtės valdiklis
-

PLATUS vertikalus ekrano apkrovos momento indikatoriaus ekranas (išskirtinis „Zoomlion“ kranams)
-
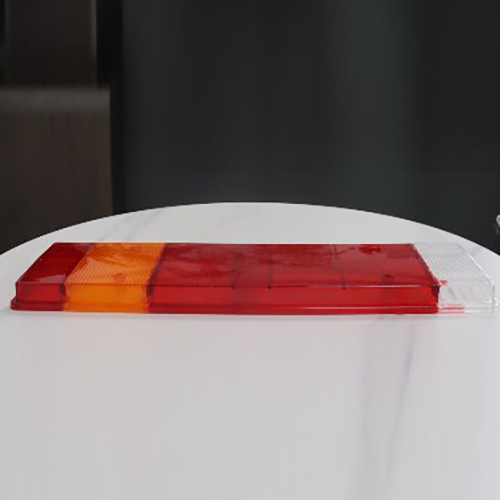
25K apatinio galinio žibinto objektyvas
-

Hirschmann PAT serijos LWG208 krano kabelio ritės jutiklis
-

Hirschmann DAVC 300/2401 hidraulinis keitiklis
-

A2Y07HPFU0 (0068-1) temperatūros jutiklis
-

ZF 6041.327.033 Transmisijos valdymo blokas
-

XCMG kranui skirta strėlės jungiamosios dėžės CAN plokštė
-

Senas NANQI 25K-5 priekinių žibintų mazgas
-

XCMG jutiklis LPS60-049P6009



CET.10000.2.6.1.X perteklinis kampo jutiklis
CET.1000[0.2.6.1](0.2.6.1).X yra CANopen perteklinis kampo jutiklis, pagamintas TSM (Top Sensor Manufaktur), sukurtas pramoniniams scenarijams, reikalaujantiems didelio patikimumo ir saugumo. Jis turi CANopen ryšio protokolą ir palaiko perteklinį signalo išvestį, užtikrinantį stabilų kampo duomenų grįžtamąjį ryšį sunkiosiose mašinose, žemės ūkio įrangoje, uosto technikoje, ant darbo platformose ir kitose programose, kur kampo stebėjimas yra labai svarbus saugiam darbui.
Aprašymas
Žymos
Produkto apžvalga
CET.1000[0.2.6.1](0.2.6.1).X yra CANopen perteklinis kampo jutiklis, pagamintas TSM (Top Sensor Manufaktur), sukurtas pramoniniams scenarijams, reikalaujantiems didelio patikimumo ir saugumo. Jis turi CANopen ryšio protokolą ir palaiko perteklinį signalo išvestį, užtikrinantį stabilų kampo duomenų grįžtamąjį ryšį sunkiosiose mašinose, žemės ūkio įrangoje, uosto technikoje, ant darbo platformose ir kitose programose, kur kampo stebėjimas yra labai svarbus saugiam darbui.
Pagrindinės techninės specifikacijos
| Parametras | Specifikacija |
| Modelis | CET.1000[0.2.6.1](0.2.6.1).X |
| Ryšio protokolas | CANopen perteklinis protokolas |
| Maitinimo įtampos diapazonas | 9–30 VDC |
| Signalo išvestis | CAN-DND, CAN-H, CAN-L |
| Apsaugos klasė | IP67 (pramoninis atsparumas dulkėms ir vandeniui) |
| Atleidimo dizainas | Dviejų signalų išvestis su automatiniu gedimų perjungimu |
| Būsto medžiaga | Lietas aliuminis su kieta anoduota danga |
Pagrindinės savybės
Perteklinis saugos dizainas
Sukurtas su dviem nepriklausomais jutikliais, užtikrinančiais sklandų perjungimą, jei vienas kanalas sugenda. Atitinka funkcinius saugos standartus, tokius kaip ISO 13849, neleidžiant įrangai prarasti kontrolės dėl jutiklio gedimo.
Vietinis CANopen palaikymas
Tiesiogiai integruojamas su CANopen pramoninėmis magistralių sistemomis, palaikančiomis DS301/DS406 protokolus, kad būtų galima greitai prisijungti prie pagrindinių PLC ir valdiklių, taip sumažinant antrines kūrimo išlaidas.
Didelis kampo matavimo tikslumas
Naudoja magnetoelektrinio jutimo technologiją su 0,01° skiriamąja geba ir ±0,05° pakartojamumu, suteikdama tikslų realiojo laiko kampo grįžtamąjį ryšį robotų rankoms, vairavimo mechanizmams ir kt.
Tipinės programos
Statybinės mašinos: Ekskavatorių ir krautuvų strėlės kampo stebėjimas ir saugos ribos
Specializuotos transporto priemonės: Gaisrinių automobilių kopėčių ir gelbėjimo įrangos kampų saugos stebėjimas
Montavimo ir laidų instrukcija
Mechaninis montavimas
Pritvirtinkite prie įrangos per flanšą naudodami M6 varžtus, rekomenduojamas sukimo momentas: 8–10 N·m. Įsitikinkite, kad montavimo paviršius yra lygus ir be tarpų.
Elektros pajungimas
| Smeigtuko Nr. | Apibrėžimas | Aprašymas |
| 1 | CAN-NED | Signalo žemė |
| 2 | 0V | Maitinimo žemė |
| 3 | 9–30 VDC | Teigiamas maitinimo šaltinis |
| 4 | CAN-H | CAN Autobusas Aukštas |
| 5 | CAN-L | CAN autobusas žemas |
Eksploatacijos pradžios patarimai
Prisijungę prie CANopen magistralės, priskirkite mazgo ID naudodami EDS konfigūracijos failą. Visada patikrinkite laidus prieš įjungdami, kad išvengtumėte žalos dėl atvirkštinio poliškumo.
SUSISIEKITE MUMS
Susiję produktai
XCMG jutiklis LPS60-049P6009
LPS60-049P6009 yra pramoninio lygio dviejų kanalų slėgio jutiklis, sukurtas hidraulinėms sistemoms. Jame naudojami didelio tikslumo išsklaidyto silicio jutimo elementai, siunčiantys du nepriklausomus standartinius elektrinius signalus, kad būtų galima tiksliai stebėti slėgio svyravimus statybinių mašinų hidraulinėse grandinėse, o valdymo sistemai teikia realiu laiku ir stabilius slėgio duomenis. Specialiai sukurtas XCMG kėlimo platformoms ir kitai sunkiajai įrangai, jis pasižymi puikiu atsparumu vibracijai, smūgiams ir korozijai, todėl užtikrina ilgalaikį patikimą veikimą net ir atšiauriomis darbo sąlygomis.
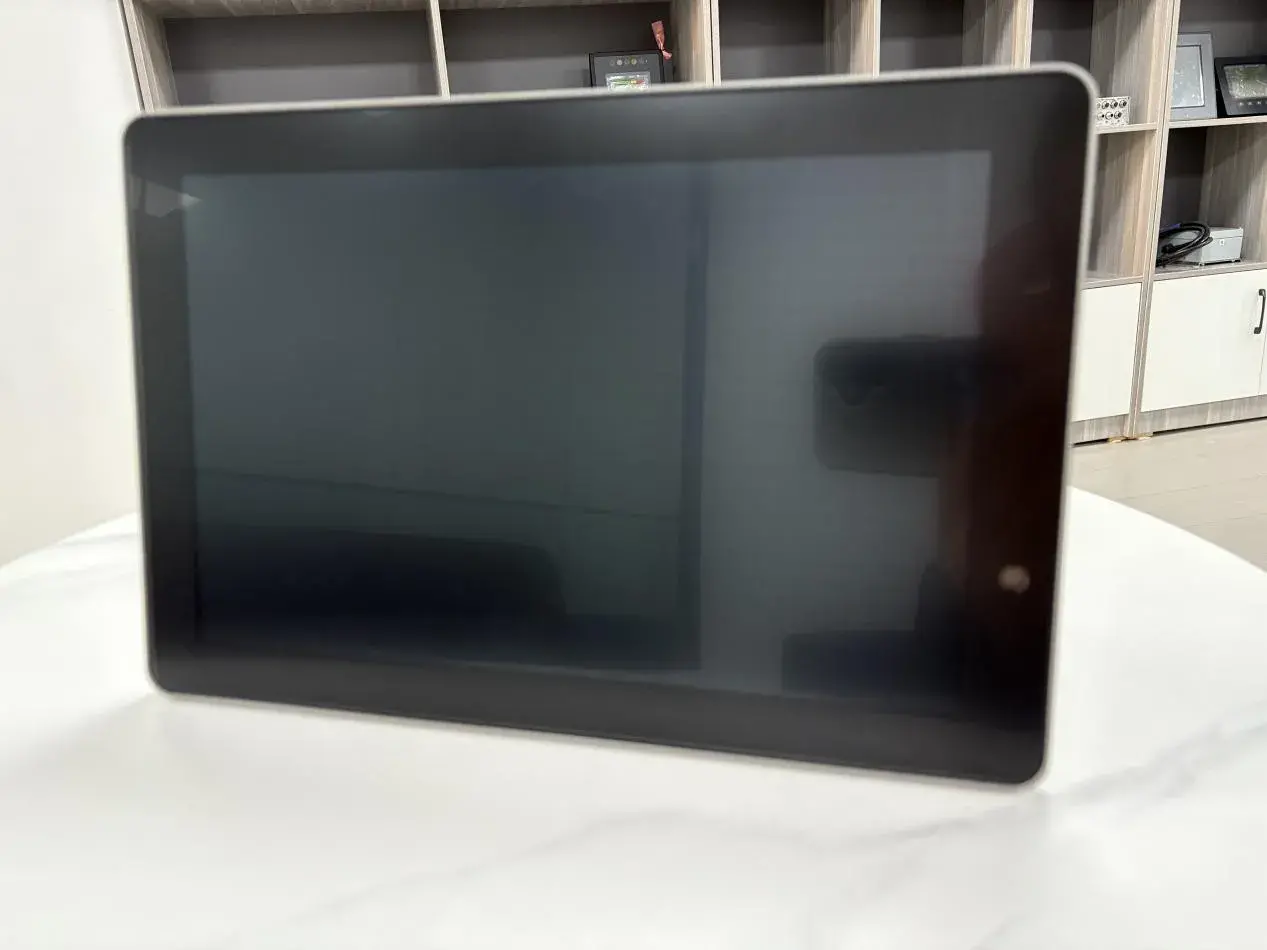
X603F apkrovos momento indikatoriaus (LMI) ekrano terminalas
Kritinių parametrų, įskaitant apkrovos svorį, strėlės ilgį, darbinį kampą ir spindulį, rinkimas ir rodymas realiuoju laiku Sumanus momento skaičiavimas su dinamišku palyginimu su saugos slenksčiais, suaktyvinantis automatinius garso ir vaizdo aliarmus, kai viršijamos ribos. 4G nuotolinis duomenų perdavimas leidžia centralizuotai stebėti automobilių parką ir išankstinius įspėjimus apie gedimus. reikmenys ir atšiauri lauko aplinka

XCMG Crane IC4600 sistemos pagrindinė plokštė ir tvarkyklės plokštė
Tai brangus originalaus Hirschmann IC4600 kompiuterio pakaitalas, sukurtas išskirtinai XCMG kranams. Mūsų pagrindinė plokštė buvo išbandyta 12 mėnesių darbo lauke būklės, todėl buvo pasiektas 100% suderinamumas. Jis gali tiesiogiai pakeisti sugedusias pagrindines plokštes, kad būtų greitai atkurtos viršutinio krano kompiuterio parametrų rodymo ir judesio valdymo funkcijos, žymiai sumažinant priežiūros išlaidas ir prastovos laiką.

EPEC 6107 pramoninis ekranas
Didelio našumo žmogaus ir mašinos sąsaja (HMI), sukurta atšiaurioms darbo aplinkoms, tokioms kaip statybos mašinos ir kasybos įranga. Tai leidžia vizualiai valdyti ir sąveikauti su duomenimis, užtikrinant stabilų ir patikimą ekraną bei veikimą sunkioms mašinoms.

XCT Qixing serijos priekinis žibintas – gaminio aprašymas
Sukurtas specialiai statybinėms transporto priemonėms ir visureigių modifikacijų scenarijams, šis priekinis žibintas turi integruotą sandarinimo procesą, kuris subalansuoja ilgaamžiškumą ir apšvietimo efektyvumą, todėl tai yra ekonomiškas pasirinkimas keičiant ir atnaujinant originalios įrangos gamintojus.

Hirschmann HC3902 krano ekrano terminalas
Profesionalus ekrano blokas, sukurtas atšiaurioms statybinės technikos sąlygoms, tarnaujantis kaip pagrindinė mobiliųjų kranų, vikšrinių kranų ir kitos kėlimo įrangos apkrovos momento indikatoriaus (LMI) sistemų sąsaja. Jis užtikrina saugos stebėjimą realiuoju laiku, kad būtų užtikrintos saugios kėlimo operacijos.

„Zoomlion“ mobiliojo krano apkrovos momento indikatoriaus (LMI) ekrano terminalas
Tai originalios įrangos gamintojo (OEM) apkrovos momento indikatoriaus (LMI) ekrano terminalas, sukurtas išskirtinai Zoomlion vidutinio ir mažo tonažo mobiliesiems kranams. Kaip pagrindinis saugos komponentas, jis realiu laiku renka ir rodo svarbiausius eksploatacinius duomenis, įskaitant krovinio svorį, strėlės ilgį, darbinį spindulį ir strėlės kampą. Kai sistema nustato, kad kranas artėja prie savo saugos ribos, ji nedelsiant įjungia garsinį ir vaizdinį pavojaus signalą, kad būtų išvengta perkrovos ir apsivertimo nelaimingų atsitikimų.

PAT DSIK380 apkrovos momento indikatoriaus (LMI) monitorius
PAT DSIK380 yra tvirta, pramonėje pirmaujanti saugos stebėjimo šerdis, skirta kėlimo įrangai. Jis nuolat renka ir analizuoja svarbiausius darbinius duomenis, įskaitant krovinio svorį, darbinį spindulį, strėlės aukštį ir pasukimo kampą. Priartėjus prie saugos slenksčių arba juos viršijus, jis nedelsiant įjungia garsinius ir vaizdinius perspėjimus ir automatiškai nutraukia pavojingus judesius, taip veiksmingai užkertant kelią nelaimingiems atsitikimams, pvz., dėl perkrovos sukelto apvirtimo ar konstrukcijos pažeidimų.

533 40-A35B0W0-0 kampinis koduotuvas
NOBEL ELEKTRONIK GmbH sukurtas kampinis daviklis 533 40-A35B0W0-0 užtikrina aukšto tikslumo kampinės padėties grįžtamąjį ryšį reiklioms pramonės aplinkoms. Dėl tvirtos konstrukcijos ir patikimo veikimo jis idealiai tinka naudoti, kai tikslus sukimosi jutimas yra labai svarbus, net ir atšiauriomis sąlygomis.

SENTOP BN60FCA elektroninis akceleratoriaus pedalas
SENTOP BN60FCA elektroninis akceleratoriaus pedalas yra skirtas šakiniams krautuvams, krautuvams, ekskavatoriams ir kitai statybų technikai, taip pat elektrinėms transporto priemonėms. Jame naudojama bekontakčio Hall jutiklio technologija pedalo judėjimui paversti tiksliais elektriniais signalais, leidžiančiais tiksliai valdyti variklio sūkius arba variklio galią. Šis pedalas, turintis dvigubą perteklinį signalo išvestį ir IP67 apsaugą, užtikrina patikimą veikimą atšiauriomis darbo sąlygomis ir yra pagrindinis pramoninių transporto priemonių valdymo komponentas.
Hirschmann A2B-Z DC-12 aukščio ribinis jungiklis (anti-overwind jungiklis)
Šis gaminys yra saugos įtaisas, specialiai sukurtas statybinėms mašinoms. Pagrindinė jo funkcija yra neleisti krano kabliams persivynioti kylant, taip išvengiant plieninių vielinių lynų lūžimo ar įrangos sugadinimo. Pagamintas su itin tvirtu pramoniniu korpusu ir tikslia mechanine gaiduko konstrukcija, jis patikimai veikia įvairiomis sudėtingomis darbo sąlygomis, todėl yra būtinas kranų, bokštinių kranų ir kitos kėlimo įrangos saugos komponentas.
Zoomlion Original Power Control Board – specializuotas energijos paskirstymo modulis statybinėms mašinoms
🔹 Pagrindinės funkcijos Kelių grandinių maitinimo paskirstymas: palaiko nepriklausomą maitinimo šaltinį keliems...

XCMG kranui būdingas Hirschmann IC2600 apkrovos momento indikatoriaus ekranas | Originalios įrangos saugos stebėjimo kompiuteris
XCMG kranui būdingas Hirschmann IC2600 apkrovos momento indikatoriaus ekranas | Originalios įrangos saugos stebėjimo kompiuteris
SANY krano aukščio ribotuvas (nuo pervyniojimo jungiklis)
Sukurtas specialiai SANY ir įvairių tipų kėlimo įrangai, tai pagrindinis saugos įtaisas, apsaugantis nuo kablio perslinkimo ir užtikrinantis statybos saugumą.
ICP6600 apkrovos momento ribotuvo ekranas
Hirschmann ICP6600 apkrovos momento ribotuvo ekranas | XCMG aukščiausios klasės kranų saugos stebėjimo terminalas

Krano saugos atnaujinimo sprendimas: „Intelligent Moment Limiter“ modernizavimo rinkinys
Pagrindiniai privalumai Universalus suderinamumas: sklandžiai veikia su pirmaujančiais prekių ženklais, tokiais kaip XCMG, Zoomlion,...